 设为首页
加入收藏
设为首页
加入收藏
教学设计示例1
教学重点:通过探索性实验总结出杠杆平衡条件.
教学难点:对力臂的引入和理解.
教具:
研究杠杆平衡条件的实验的配套器材、剪刀、钳子、指甲刀、瓶盖起子、镊子、钉有钉子的木板、多媒体课件或录像
教学过程设计:
(一)引入新课
展示各种工具:剪刀、钳子、指甲刀、瓶盖起子、食品夹等
指出这些简单的工具都称为简单机械.
投影或录像:机床、缝纫机、起重机等.
指出这些也是机械,不过比较复杂,称为复杂机械(或机器).但无论多复杂的机械都是由简单机械组合而成的.学习简单机械的知识是理解复杂机械的基础.本节课研究最简单的机械――杠杆.(板书课题)
(二)新课教学
一、杠杆的概念
投影:汲水的桔槔、埃及人建金字塔的图片.
引导提出问题:人类很早就使用杠杆了,在三千多年前,古人用来在井上汲水的桔槔,它就是一个杠杆.古埃及人建造金字塔时就是靠杠杆这种简单机械搬动巨大石块,从而创造了世界奇迹.什么是杠杆呢?它在使用中有什么特点呢?
学生探究活动:认识杠杆.
请同学们观察(动画或录像):用撬棒撬石头的两种方式、小孩在玩跷跷板、压活塞式抽水机的手柄取水.
思考问题:撬棒、跷跷板、手柄都是杠杆,它们有什么共同点?
学生分组探究讨论.(提供器材:镊子、钉有钉子的木板、铅笔模拟撬棒)尽可能由学生总结结论.若得不出结论可提示:
1)每种工具的工作任务是什么?(确定阻力)
2)人们是怎样利用这种工具完成任务的?(是否有转动的现象?是否都有绕着固定点转动?是否给杠杆施加力了?)(确定支点、动力)
3)这些工具的共同点有哪些?
①都是硬棒.(软的不行,直的弯的都可以)
②工作过程中都在转动,转动过程中有一点是不动的.
③除固定不动的点外,还要受到两个力的作用,一个能使它转动,另一个阻碍它转动.
请总结出:在力的作用下能绕固定点转动的硬棒叫杠杆;得出:支点、动力、阻力的概念(板书出具体内容).
练习:观察图13-1-1,思考下列工具在工作过程中,是否是杠杆?若为杠杆,确定支点的位置、动力、阻力作用点和方向.
二、影响杠杆转动的因素
提出问题:杠杆能在力的作用下转动,哪些因素影响杠杆的转动呢?
学生探究活动:探究影响杠杆转动的因素有力和力臂.
简介实验装置,由学生判定此装置是否可看为杠杆?若为杠杆,确定支点,动力、阻力(任意设定哪个力是动力,哪个力是阻力,本案例设左边为阻力).
实验1:(使用前调节平衡)钩码挂在如图13-1-2位置平衡.
实验2:左边钩码不变,右边加一个或减少一个钩码,杠杆是否仍平衡?现象说明了什么问题?
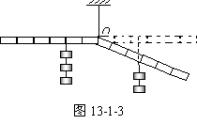
实验3: 换上另一个弯曲杠杆(如图13-1-3),保持左右两边动力、阻力不变,杠杆是否仍平衡?
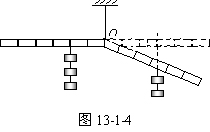
实验4:保持左边阻力不变,仍用刚才的钩码,要保持杠杆左侧水平,右侧的钩码应该放在哪呢?仔细观察,平衡时如图13-1-4所示,支点到力的作用线的距离与实验1情况相同.
改变阻力大小重复上述4个实验.
分析得出结论:力的大小、支点到力的作用线的距离大小影响杠杆的转动.
给出力臂的概念:支点到力的作用线的距离称为力臂.(板书)
作图说明动力臂、阻力臂(注意作图规范,如图13-1-5).结合例题介绍画力臂的一般方法:
1)辨认杠杆;
2)先找支点O;
3)过力的作用点沿力的方向画出力的作用线;
4)由支点向力的作用线作垂线;则支点到垂足的线段为力臂.
我们用支点、动力、阻力、动力臂、阻力臂来描述杠杆,总称为杠杆的五要素.
三、杠杆的平衡条件
学生探究活动:用实验1的装置和钩码研究杠杆平衡的条件,将实验数据记录在表格中.
|
实验次数 |
动力F1/N |
动力臂l1/cm |
动力×动力臂 |
阻力F2/N |
阻力臂l2/cm |
阻力×阻力臂 |
|
1 |
||||||
|
2 |
||||||
|
3 |
活动过程参照教材192页.
分析数据得出结论:杠杆的平衡条件:动力´动力臂=阻力´阻力臂
四、板书设计
教学设计示例2
一、重点、难点、疑点及解决办法
1.重点杠杆平衡条件
解决办法 通过探索性实验总结出来
2.难点 对力臂的引入和理解
解决办法 由实验、再结合图形得到
二、课时安排
1课时
三、教学步骤
1.引入新课
今天我给大家带来了一些日常生活用的工具,请同学说出这些工具的名称和用途?(出示羊角锤或木工用的起子、剪刀、钳子、食品夹)
这些能给我们提供方便的工具都称为机械.
(展示观察图片)这些物体也是机械,不过比较复杂,称为复杂机械.无论多复杂的机械都是由简单机械组合而成的.学习简单机械的知识是理解复杂机械的基础.
现在,谁帮我一个忙,用这里三种不同的工具(羊角锤、硬棒、钳子)把木块中的钉子拔出来.(探究)
比较用羊角锤拔钉子,用钳子拔钉子,这两种情况用力一样吗?
哪一种工具更省力呢?羊角锤.
我们来描述用羊角锤(或起子)拔钉子的过程.(多媒体演示,加深印象)
首先用羊角锤(或起子)钳住钉帽,然后锤身抵住木块,用力扳手柄,钉子就被拔出来了.
羊角锤是常用的工具,谁知道它是根据什么原理制造的呢.它是根据杠杆原理制造的.那杠杆是怎么一回事呢?今天大家就共同来探究杠杆(板书:探究杠杆).首先,我们来认识什么是杠杆?(板书:一、什么是杠杆).
最简单的杠杆就是撬石头时用的撬棒.(多媒体演示)
小时侯玩的跷跷板也是杠杆. (多媒体演示)
活塞式抽水机的手柄工作时也是杠杆.(多媒体演示)
请思考这三个杠杆有什么共同点?
(探究)学生分组讨论,请组员回答.
①都是硬棒.(软的不行,直的弯的都可以)
②工作过程中都在转动,转动过程中有一点是不动的.
③除固定不动的点外,还要受到两个力的作用,一个能使它转动,另一个阻碍它转动.
总结出:在力的作用下能绕固定点转动的硬棒叫杠杆;得出:支点、动力、阻力的概念(板书出具体内容).
一、杠杆――一根硬棒、在力的作用下如果能绕着固定
点转动,这根硬棒就叫杠杆.(板书)
杠杆的共同点(以撬石头为例)
①绕着固定点转动.固定点――杠杆的支点
③受到力的作用.动力和阻力
支点O――杠杆绕着转动的点
动力 ![]() ――使杠杆转动的力
――使杠杆转动的力
阻力 ![]() ――阻碍杠杆转动的力(板书)
――阻碍杠杆转动的力(板书)
练习:展示一组图片,思考这些工具在工作过程中,是否是杠杆?若为杠杆,确定支点的位置、动力、阻力作用点和方向.
2.关于力臂的教学:
提问:支点与力的作用点间距离的远近一定会给力的作用效果带来影响吗?
实验1 展示图3所示的示教板.
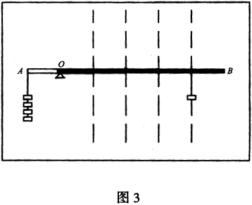
(边说边演示)示教板上有一杠杆AB,O点是杠杆的支点,O点右边每隔10厘米1条虚线将50厘米长的OB杆等分.现在取5个等质量的钩码,将其中4个挂在杠杆左端A处,作为杠杆的阻力
![]() .剩下的1个作为杠杆的动力
.剩下的1个作为杠杆的动力
![]() ,手拿该钩码在OB间寻找挂点,使杠杆平衡,刚好挂在第4个格上.
,手拿该钩码在OB间寻找挂点,使杠杆平衡,刚好挂在第4个格上.
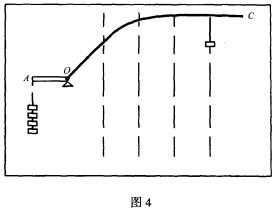
实验2 将OB卸下来,换上OC杆,虚线位置不变(如图4所示)保持左边的阻力
![]() 不变,仍用刚才的钩码寻找使杠杆平衡的挂点,发现钩码(动力
不变,仍用刚才的钩码寻找使杠杆平衡的挂点,发现钩码(动力
![]() )仍在第4条虚线上,但此时力的作用点到O点间距离发生了变化.
)仍在第4条虚线上,但此时力的作用点到O点间距离发生了变化.
实验3 将OC卸下来,换上OD杆(如图5所示),步骤同上.发现钩码(动力
![]() )仍在第4条虚线上,力的作用点到O点间的距离也发生了变化.
)仍在第4条虚线上,力的作用点到O点间的距离也发生了变化.
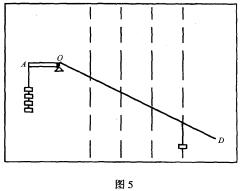
上面3个实验结论的共同点是什么?
在阻力保持不变的情况下,尽管动力作用点与支点间的长度发生了变化,但支点与动力作用线间的距离仍然保持不变(力的作用线:通过力的作用点沿力的方向所画的直线,叫做力的作用线).
可见动力的作用效果不是由支点到动力作用点间的长度决定,而是由支点到动力作用线间的距离决定.我们把从支点到动力作用线间的距离叫做动力臂.从支点到阻力作用线间的距离叫做阻力臂.
动力臂 ![]() ――从支点到动力作用线的距离
――从支点到动力作用线的距离
阻力臂 ![]() ――从支点到阻力作用线的距离
――从支点到阻力作用线的距离
(板书)
因此,描述杠杆需要五个要素――支点O、动力
![]() 、阻力
、阻力 ![]() 、动力臂
、动力臂 ![]() 、阻力臂
、阻力臂 ![]() ,总称为杠杆的五要素.
,总称为杠杆的五要素.
下面请同学们画出图6中杠杆的动力臂 ![]() 和阻力臂
和阻力臂 ![]() ――撬棒、抽水机(介绍杠杆示意图和力臂的画法,详见书P192图13-2).
――撬棒、抽水机(介绍杠杆示意图和力臂的画法,详见书P192图13-2).
3.关于杠杆平衡条件的教学
什么是杠杆我们已经比较清楚了,利用杠杆为什么能用小的力产生大的力呢?我们知道人们通常是在杠杆平衡或非常接近平衡的情况下使用杠杆的.下面我们请同学们通过做实验来研究杠杆的平衡条件.
二、杠杆的平衡条件(板书)
学生实验 实验装置如图7所示(支点O用铁架台支撑.事先在左右各挂一个钩码使杠杆平衡.)
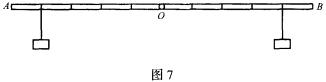
请同学找出这个杠杆的五要素(O、 ![]() )
)
若将右端的1个钩码换成2个钩码,那么应将钩码挂在什么位置能使杠杆重新平衡(学生猜想、操作、记录实验数据)
它们之间存在什么关系?
力与力臂的乘积相等.
那么,还可以采取什么方法使杠杆再次平衡?
将4个钩码挂在1个格的位置上.(用操作结果证实.)
实验数据
|
次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
|
1 |
1 |
4 |
1 |
4 |
|
2 |
1 |
4 |
2 |
2 |
|
3 |
1 |
4 |
4 |
1 |
你能将实验结论加以归纳吗?
动力×动力臂=阻力×阻力臂
![]() (板书)
(板书)
用比例式表示 ![]() ,它的含义是:如果动力臂是阻力臂的几倍,那么动力就是阻力的几分之一.
,它的含义是:如果动力臂是阻力臂的几倍,那么动力就是阻力的几分之一.
![]() (板书)
(板书)
这个平衡条件也就是阿基米德发现的杠杆原理.
四、总结
今天,我们学习了什么是杠杆、杠杆的五要素和杠杆的平衡条件.现在,你能运用所学知识解释阿基米德的豪言壮语“给我一个支点,我就能搬动地球”吗?
根据杠杆平衡条件,如果动力臂是阻力臂的几倍,那么动力就是阻力的几分之一.当动力臂>阻力臂时,则动力<阻力.
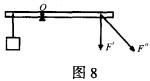
课堂练习:【例1】 画出图8中 ![]() 和
和 ![]() 的力臂,并比较杠杆平衡时
的力臂,并比较杠杆平衡时 ![]() 与
与 ![]() 的大小.
的大小.
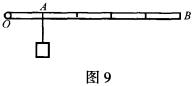
【例2】 图9所示杠杆,OA长20厘米,AB长60厘米,现在A处挂一重200N的物体,若使B处的弹簧秤示数最小,弹簧秤的方向怎样?弹簧秤的示数是多少?
五、布置作业
书P193题1、2、3
六、板书设计
第十三章 简单机械
第一节 杠杆
一、杠杆 一根硬棒、在力的作用下如果能绕着固定点转动,这根硬棒就叫杠杆.
支点O――杠杆绕着转动的点
动力 ![]() ――使杠杆转动的力
――使杠杆转动的力
阻力 ![]() ――阻碍杠杆转动的力
――阻碍杠杆转动的力
动力臂 ![]() ――从支点到动力作用线的距离
――从支点到动力作用线的距离
阻力臂 ![]() ――从支点到阻力作用线的距离
――从支点到阻力作用线的距离
二、杠杆的平衡条件――
动力×动力臂=阻力×阻力臂 ![]() (
( ![]() )
)